步进电动机的驱动伺服系统,加到步进电动机的定子绕组上的电脉冲信号,是由步进电动机的驱动控制器给出的,驱动控制器由环形分配器和功率放大器两部分组成。在许多CNC系统中,环形分配器的功能由软件产生,在这种情况下,驱动器就不包括环形分配器。
1.环形分配器
环形分配器输入端的指令脉冲是CNC插补器输出的一系列指令脉冲,输出则加到步进电动机相应绕组的功率放大器的输入端。也就是说环形分配器的任务是把来自CNC的一列脉冲信号,按照一定的顺序分配到步进电机的每一相绕组上。
环形分配器是根据步进电动机的相数和控制方式设计的。
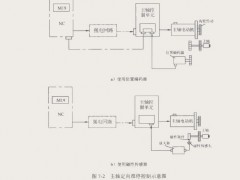
硬件的环形分配器可用数字集成电路系列中的基本门电路和触发器构成,但这样构成的环形分配器过于复杂,随着大规模集成电路技术的发展,现在,实用的环形分配器均是集成化的专用电路芯片,这些芯片通常还包括除脉冲分配控制之外的其它他功能。图1为三相硬件环形分配器的驱动控制示意图。图中CLK为数控装置发出的脉冲信号,DIR为正负方向信号,FVLL/HALF用于控制整步或半步运行。每来一个脉冲信号,环形分配器按照一定的顺序(正负方向,整步、半步条件)把脉冲分配到某一相驱动的输入端。
2.功率放大器(驱动放大电路)
步进电动机是几相的,在驱动装置中就有几路驱动放大电路,如图1中,三相步进电动机,在驱动装置中就有三路驱动电路,每一路连接步进电动机的一相绕组。功率放大器的作用是将环形分配器发出的TTL电平信号放大至几安到十几安的电流送至步进电动机的各绕组。下面主要以高低压切换驱动为例介绍典型的驱动功率放大电路。
1)高低压切换驱动电路
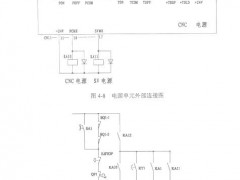
图2所示为一高低压驱动放大电路,图中由脉冲变压器T组成了高压控制电路。当输入信号为低电平时,V1、V2、Vg、Vd均截止,电动机绕组中无电流流过,步进电动机不转动,当输入信号为高电平时,V1、V2、Vd饱和导通,在V2由截止过渡到饱和导通期间,与T一次侧串联的V2集电极回路电流急剧增加,在T的二次侧产生一个感应电压,加到高压功率管Vg的基极上,使Vg导通,80V的高压经过Vg加到电动机绕组上,使电流按La/(Rd+r)的时间常数向电流稳定值Vg/(Rd+r)上升。经过过渡过程后,V2进入稳定状态(饱和导通)后,T一次侧电流达到稳定值,无磁通量变化,T的二次侧感应电压为零,Vg截止。这时12V低压电源经二极管VDd加到绕组La上,维持La中的额定电流。
当输入脉冲结束后,V1、V2、Vg、Vd、又都截止,储存在La中的能量通过Rg、VDg构成放电回路,进行释能。该电路由于脉冲开始采用高压驱动,电流增长加快,使绕组的脉冲电流的前沿变陡,使电动机的转矩和起动及运行频率都得到提高。又由于额定电流是低压维持的,故只需较小的限流电阻,功耗效小。
2)斩波驱动电路
斩波驱动电路的出现是为了弥补双电压电路的高低压电路波形连接处的凹形,改善输出转矩下降,使励磁绕组中的电流维持在额定值附近。这种驱动方式的电路结构虽然复杂一些,但由于没有外接电阻,使整个系统的功耗下降很多,相应提高了效率。同时由于驱动电压较高,电机绕组回路又不串电阻。所以电流上升很快,当到达需要的数值时,由于取样电阻的反馈控制作用,绕组电流可以恒定在确定的数值上,从而保证在很大的频率范围内,步进电动机都能输出恒定的转矩,大大改善了高频响应特性,这种驱动方式的另一优点是减少了电机共振现象的发生。