一.速度环调整
1.调整的形式: 驱动装置上的电位器、数字式调整2.调整的主要参数
1)速度环增益调整—改善进给传动特性,避免振荡.
2)零飘调整—克服电器参数的漂移或不对称,造成无给定信号时有转速输出的现象.
3)测速反馈深度调整—改善速度环控制的机械特性.
4)滞后时间常数调整—反映驱动装置对速度给定信号的响应时间.
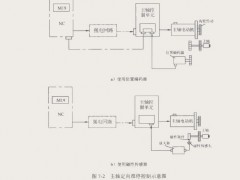
二.位置环调整
位置环参数常以机床数据的形式,在数控系统中通过软件运行来实现.
1.Kv系数—位置环增益系数
2.复合增益系数
3.加速度
4.精停和粗停允差
5.夹紧允差
6.零速监控延时
7.漂移补偿
8.轮廓监控允差带
9.反向间隙补偿
10.丝杠螺距误差补偿.