1.611U/Ue数字式交流伺服驱动系统基本组成
SIEMENS 611U/Ue是目前SIEMENS常用的交流数字式伺服驱动系统,其基本结构与611A相似,采用模块化安装方式,主轴与各伺服驱动单元共用电源。用于进给驱动的伺服驱动模块有单轴与双轴两种结构型式,带有PROFIBUS DP总线接口。
驱动器内部带有FEPROM(non-volatile data memory,非易失可擦写存储器),用于存储系统软件与用户数据,驱动器的调整、动态优化可以在W1NDOWS环境下,通过SimoComU软件自动进行,安装、调整十分方便。
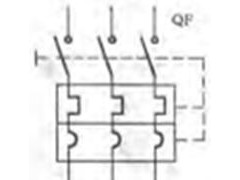
驱动器由整流电抗器(或伺服变压器)、电源模块(NE module)、功率模块(Power module)、611控制模块等组成:电源模块自成单元,功率模块、611控制模块、PROFIBUS DP总线接口模块组成轴驱动单元。各驱动器单元间共用611直流母线与控制总线,并通过PROFIBUS DP总线,与SIEMENS 802D/810D/840D系统相连接,组成数控机床的伺服驱动系统。其中电源模块与进给模块的示意图如图5-19所示。
2.611U/Ue数字式交流伺服驱动器的状态显示
(1)电源模块的状态显示 与61lA驱动器相似,611U/Ue系列数字伺服驱动器电源模块(UE或I/R)设有6个状态指示灯(LED),其相对位置及其含义如下:
V1-OO-V2 V1:DCl5V控制电源故障。
V3-OO-V4 V2:DC5V控制电源故障。
V5-OO-V6 V3:电源模块未“使能”。
V4:电源模块已“使能”,直流母线己充电。
V5:进线电源故障。
V6:直流母线电压过高。
(2)标准进给驱动模块的状态显示 611U/Ue系列数字伺服驱动单元的状态显示,可以通过驱动控制板上的6只数码管进行,它可以详细显示驱动器的状态与报警号。6只数码管显示的基本作用如下:
口口口口口口 1:显示“E”,表示驱动器报警
↑↑↑↑↑↑ 2:显示“-”,表示驱动器有一个报警。
l 2 3 4 5 6 显示“≡”,表示驱动器有多个报警,通过按键“P”可以显示其余报警号。
3:显示“A”,表示驱动器A报警。
显示“B”,表示驱动器B报警。
4/5/6:报警号显示。
以上显示的报警内容,可以参见611驱动器使用说明书。但部分报警,不能通过数码管进行显示,这些报警主要有:
1)6只数码管无任何显示。6只数码管无任何显示,可能的原因如下:
①电源两相以上缺相。
②两相以上电源熔断器熔断。
③电源模块的辅助电源故障。
④电源模块与轴控制单元间的设备总线未连接。
⑤轴控制板不良。
2)6只数码管显示“――――――”。6只数码管显示“――――――”,可能的原因如下:
①驱动器系统软件未安装。
②存储器模块中未带驱动器系统软件。
3)驱动器“使能”后,电动机立即开始高速旋转驱动器“使能”后,电动机立即开始高速旋转,可能的原因如下:
①编码器脉冲数设定错误。
②选择了开环转矩控制方式。
③编码器不良。
④轴控制模块故障。
4)驱动器“使能”后,电动机即开始旋转 驱动器“使能”后,电动机即开始旋转可能的原因如下:
①驱动器参数设定错误。
②数控系统参数设定错误。
5)电动机转速太低(小于50r/min)电动机转速太低(小于50r/min),可能的原因如下:
①编码器脉冲数设定错误。
②电动机相序错误。
③轴控制模块故障。
6)驱动器“使能”后,电动机出现短时旋转 驱动器“使能”后,电动机出现短时旋转,可能的原因如下:
①电源模块不良。
②电动机编码器连接错误。
③编码器不良。
3.611U/Ue数字式交流伺服驱动器的初始化
611U/Ue驱动器的调整与设定,不需要通过硬件进行,它可以直接使用Simo ComU软件进行设定与优化。驱动器的初始化设定,其操作步骤如下(以802D系统为例)。
1)利用“驱动器调试电缆”,将调试计算机与611UE的X471接口联接。
2)接通驱动器电源,此时611UE的状态显示为“A1106”,表示驱动器没有安装正确的数据:同时驱动器上R/F红灯、总线接口模块上的红灯亮。
3)从WINDOWS的“开始”菜单中找出驱动器调试软件SimoComU,并运行。
4)选择驱动器与计算机的联机方式。
5)进入联机画面后,计算机自动进入参数设定画面,在软件的提示下进行以下参数设定:
①命名轴名:例如:XK7136-X。
②根据模块的类型与安装位置,输入PROFIBUS总线地址,不同位置的总线地址见表5-26。
表5-26 611U模块PROFIBUS地址表
| 611U第一单轴模块 | 10 | 611U第三单轴模块 | 20 | 611U第一双轴模块 | 12 |
| 611U第二单轴模块 | 11 | 611U第四单轴模块 | 21 | 611U第二双轴模块 | 13 |
③设定电动机型号。
④设定电动机位置检测元器件。
⑤设定直接位置测量系统。
⑥存储参数。
6)此时,611UE的R/F红灯灭;状态显示为“A0831”,表示总线数据已经进行通信;总线接口模块上的绿灯亮。
7)完成以上调试后,若电源模块的端子48、63、64分别与端子9接通,电源模块的黄灯亮,表示电源模块已使能,驱动器进入正常工作状态。
在进行设定时应注意:
1)RS-232通信电缆不可以进行带电插、拔,因为这样有可能损坏通信接口。
2)只有在CNC侧的“总线配置”、 “驱动器模块定位”和“位置控制使能”三组参数调试完毕后,电源模块的“就绪”信号(内部继电器触点:端子73.1与72)才能闭合。
3)在完成驱动器的设定后,还需要进行驱动器的动态调整(参数优化),这一操作要在电源模块的“准备好”信号生效后方可进行,详见下述。
4.611U/Ue数字式交流伺服驱动器参数的优化
在完成驱动器的设定后,需要对驱动器的速度环动态特性进行调试,然后才能进行位置环调试。611U/Ue的驱动器的速度环动态特性优化,可以通过SimoComU软件自动进行。优化驱动器的速度给定,由PC机以数字量给出,无须CNC控制。
驱动器速度环动态特性优化的操作步骤如下:
1)利用“驱动器调试电缆”,将调试计算机与611UE的X471接口联接。
2)如果需要对带制动的电动机进行优化,应设定对应的NC通用参数,如:对于802D为MDl4512[18]的第2位为“1”(优化完毕后恢复“1”)。
3)接通驱动器的使能信号(电源模块端子T48、T63和T64与T9接通),并将坐标轴移动到工作台的中间位置,因为驱动器优化时,电动机将自动旋转大约两转。
4)运行工具软件SimoComU。
5)选择联机方式。
6)选择“PC”控制方式,并通过“OK'’确认。
7)选择控制器子目录(Controller)。
8)选择“NoneOfthese”。
9)选择自动速度控制器优化:“Execute automatic speed controller setting”。
10)进入优化后,选择“Execute stepsl-4”(1~4步)自动执行如下优化过程:
①分析机械特性一(电动机正转,带制动电动机的制动器应松开)。
②分析机械特性二(电动机反转,带制动电动机的制动器应松开)。
⑧电流环测试(电动机静止,带制动电动机的制动器应夹紧)。
④参数优化计算。
当执行完“b”后,SimoComU会出现提示:“电流环优化,垂直轴的电动机制动器一定要夹紧,以防止坐标轴下滑”,此时对于带制动电动机必须夹紧制动器,以防止坐标轴的下滑。
通过以上调整,在驱动器无硬件故障时,即可进行正常工作。