故障现象:一台配套FANUC 7M系统的加工中心,机床起动后,CRT显示38号报警。
分析与处理过程:FANUC 7M出现38号报警的含义是Z轴停止时的位置跟随误差超过允许的范围。
对于直流伺服驱动系统,为了加快动态响应速度,当坐标轴处于停止状态,电动机应处于“零位抖动”状态。在正常情况下,这一状态的速度控制单元的测量端CH8对地电压应在±0.5V以下,若此值过大,就会导致工作台停止时的位置跟随误差超过参数设定的允许范围。
在本机床上,检查速度控制单元的增益调整RVl电位器在60%左右,相当于速度环增益为251/S,应属于正常的设定,调整RVl故障无法排除。
进一步利用示波器观察测量端CH2的测速发电机输入波形,并与其他轴的信号相比较,发现Z轴的测速发电机的输入信号脉动过大,初步判定故障是由测速发电机不良引起的。进一步检查发现,测速发电机的刷架机械位置发生了偏移、刷架已经断裂,造成反馈信号的脉动过大,引起停止时的位置跟随误差的超差。
更换测速发电机的刷架后,故障排除,机床恢复正常。
故障现象:一台配套FANUC 7M系统的立式加工中心,开机时,系统出现ALM05、07和37号报警。
分析与处理过程: FANUC 7M系统ALM05、ALM07的含义同前;ALM37是Y轴位置误差过大报警。
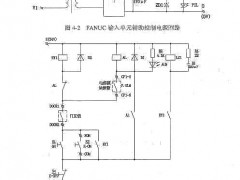
分析以上报警,ALM05报警是由于系统“急停”信号引起的,通过检查可以排除;ALM07报警是系统中的速度控制单元未准备好,可能的原因有:
1)电动机过载。
2)伺服变压器过热。
3)伺服变压器保护熔断器熔断。
4)输入单元的EMG(IN1)和EMG(IN2)之间的触点开路。
5)输入单元的交流100V熔断器熔断(F5)。
6)伺服驱动器与CNC间的信号电缆连接不良。
7)伺服驱动器的主接触器(MCC)断开。
ALM 37报警的含义是“位置跟随误差超差”。
综合分析以上故障,当速度控制单元出现报警时,一般均会出现ALM 37报警,因此故障维修应针对ALM07报警进行。
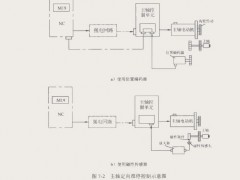
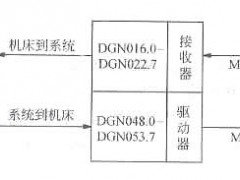
在确认速度控制单元与CNC、伺服电动机的连接无误后,考虑到机床中使用的X、Y、Z伺服驱动系统的结构和参数完全一致,为了迅速判断故障部位,加快维修进度,维修时首先将X、Z两个轴的CNC位置控制器输出连线XC(Z轴)和XF(Y)轴以及测速反馈线XE(Z轴)与XH(Y轴)进行了对调。这样,相当于用CNC的Y轴信号控制Z轴,用CNC的Z轴信号控制Y轴,以判断故障部位是在CNC侧还是在驱动侧。经过以上调换后开机,发现故障现象不变,说明本故障与CNC无关。
在此基础上,为了进一步判别故障部位,区分故障是由伺服电动机或驱动器引起的,维修时再次将Y、Z轴速度控制单元进行了整体对调。经试验,故障仍然不变,从而进一步排除了速度控制单元的原因,将故障范围缩小到Y轴直流伺服电动机上。
为此,拆开了直流伺服电动机,经检查发现,该电动机的内装测速发电机与伺服电动机间的联接齿轮存在松动,其余部分均正常。将其联接紧固后,故障排除。