1.引言
DAU-150型电液控制仿型铣床是日本牡野(MAKINO)公司七十年代初生产的仿型加工设备;其仿型控制系统采用的是电子时代的早期技术——分立电子元件组成的。由于年代久远,分立电子元件均已严重老化,故障频繁,且各种机械、电子备件根本无处购买,造成维修困难,已无法正常使用。应厂家要求,作者使用具有自主版权的华中Ⅰ型高性能数控系统,对该仿型铣床进行数化改造,使该机床既具有普通数控机床的功能,又具有仿型机床的功能,实现一机多用。本文对机床数控改造、尤其是仿型控制系统与数控系统之间关系等方面的内容进行了介绍。
2.数控化改造步骤
对仿型机床的改造,用户不仅要求保留原有的仿型加工功能,而且要求增加普通数控加工功能。针对用户要求和该铣床的特点、机床的数控改造分两个步骤进行。两个阶段的改造任务完成后,该机床不仅具有通用数控机床的功能,而且具有仿型机床的功能,实现一机多用。
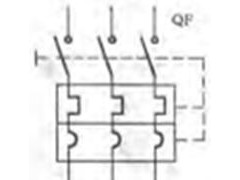
第一阶段进行机床的数控化改造,使该机床成为一台数控机床,具有数控加工能力。在原机床机械结构的基础上,采用华中Ⅰ型数控系统,取代原机床的电液控制系统;使用西门子611A交流伺服驱动单元和交流伺服电机取代原X、Y、Z三轴的液压脉冲马达,并取消庞大的伺服液压站;采用西门子变频调速器控制主轴的转速,取代原电磁离合器变速箱,实现主轴的无级调速。
第二阶段则进行仿型控制系统软件的安装及三维仿型测头的更换。原仿型测头由于超期使用,其精度与灵敏度都大大降低,已不能正常工作。而仿型测头是仿型机床的关键部件,它的性能对仿型加工的质量有着重要作用。作者选用英国雷尼绍(RENISHAW)公司的SP2型仿型测头,使用自己开发的SP2仿型测头数据样接口电路和仿型控制处理软件,实现仿型加工。
3.数控化改造原理
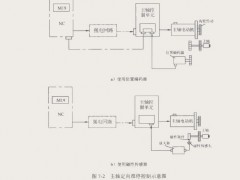
DAU-150仿型铣床的数控改造方案。采用工业计算机控制机床运动。计算机插槽插入伺服驱动控制板、I/O板、测头位移采样板等。机床由X、Y、Z三轴伺服电机驱动。I/O板用于诸如限位开关、操作面板旋钮状态、指标灯状态等检测与控制。当仿型加工时,测头位移采样板采集测头的变形量,用于控制仿型运动。显示器可实时显示测头或刀具中心的运动轨迹。采用华中Ⅰ型数控系统,将数控底层软件驻留内存。如果应用程序为普通数控解释程序,则该机床为普通数控机床;如果应用程序为仿型控制程序,则该机床为仿型加工机床。
4.仿型加工的方式
(l)一维ZOX、ZOY平面仿型
这种仿型方式又称Z轴的一维仿型,即仿型测量过程中测头只在Z轴做一维仿型退让动作,其它轴做仿型进给运动。在ZOX或ZOY平面的行切仿型过程中可由操作者在任意地点、任意时刻切换;仿型加工区域也可随时改变,仿型过程中有高度的自由,以增加对复杂曲面仿型加工能力。
(2)二维XY平面内曲线仿型
两种纯XOY平面二维曲线的仿型方式:其一为任意非自交、封闭二维曲线、其二为任意非自交、开曲线。
(3)回转曲面仿型
带层进给的二维仿型,主要用于凸台类回转曲面的仿型加工。带层进给的二维仿型层进给方向可以是沿Z轴由下向上,也可以是由上向下。带层进给的二维仿型可以进行部分回转曲面区域的仿型加工。二维仿型方向、层进给方向等控制参数可以在仿型过程中随时切换,具有较强的适宜性。
(4)三维清根仿型
三维清根仿型的目的是清除回转柱面与底面之间的切屑余量。三维清根仿型方式适合于凸台与底曲面相交部位的清根仿型切削,清根仿型初始阶段测头自寻的过程。三维清根仿型的特点是:在仿型过程中测头与型面始终保持两点接触,一为测头的底点,一为测头的测点。测头中心轨迹是一条空间曲线,三维清根仿型时三轴必须联动。
5. 仿型加工中测头跟随控制
测头与型面接触,受到x、y、z三个方向力的作用,在接触力的作用下,测头沿作用力合力的方向产生一定的偏移。设测头沿三个方向的变形分εx、εy,εz,则测头综合变形量ε应是三者的矢量和,即ε=√(ε2+xεy2+εz2)。根据仿型测量测头的跟随性要求,在仿型过程中测头应始终与曲面接触,而根据仿型加工的要求,测头的综合变形量应受到严格的约束,即εmin<ε<εmax。其中εmin是仿型加工中测头准许的最小综合变形量,εmax是准许的最大变形量。因此,仿型加工控制算法就是采取适当的策略,在仿型运动过程中,控制测头综合变形量在最小和最大准许变形量之间变动,且使综合变形量为ε0=(εmax+εmin)/2。ε0 为测头仿型运动中综合变形量的期望值。
在仿型过程中,测量单元获得测头变形量;测头跟随调节算法根据测头当前变形量与期望变形量的差值△ε=ε-ε0 以及各轴的变形量,计算x轴、y轴、z轴动速度Vx,Vy,Vz并送到伺服系统,由数控系统实现三轴仿型运动。仿型控制算法的思想是,测头在仿型运动过程中,当测头欠压时,要使测头向型面靠近;当测头过压时,要使测砂离开型面。因此测头跟随调节算法的核心是:在给定速率V的基础上确定合速度V的方向,实现合速度V向物理驱动轴的分解。
仿型合速度V的分解,有两种方法。一种是差动比例调节法,另一种是速度圆矢量分解算法。差动比例调节法适合于电液模似仿型控制,如液压马达伺服仿型控制。六、七十年代的仿型加工机床基本都采用这种仿型控制方法。由于差动比例调节法仿型加工误差大、仿型速度慢等缺点,随着数控技术的发展已逐渐淘汰。速度圆矢量分解算法对任意连续曲面仿型加工,具有对曲面形状敏感性低、仿型运动平稳性高、速度、快以及加工精度高的优点。
根据仿型跟随控制的要求,测头仿型过程中合速度分解、指令传输、伺服响应等一系列环节到机床实现给定速度的周期T应满足条件:T<(εmax-εmin)/2V ,即为了保证系统的稳定性,算法调节周期T应小于测头从最小变形量εmin以合速度V运动到最大变形量所需时间的二分之一,以确保测头在仿型加工过程中的加工精度。
在一个速度调节周期T内,测头可能的最大位移为V·T≤εmax-εmin,亦即在一个周期T内测头移动为小直线段,该段直线可近似为型面与仿型坐标平面截交线在接触点处的切线,测头仿型运动控制的实质是:测头沿切线进给运动的同时,沿接触点处法矢做进退补偿运动,以使测头在下一个速度调节周期T开始时,测头的综合变形量为ε0。速度圆矢量分解算法如图6所示,设测头与型面接触点为P,型面与仿型坐标平面截交线在接触点P处的法矢为n(注意:法矢n为型面接触点P的曲面法矢在仿型坐标平面的投影),切矢τ的正方向与x轴的正方向夹角为锐角。过P点作一跟随圆O,圆心O在过P点的法矢n上且与型面相切于点P,圆的半径r=ε0。如图6示,称坐标系zox为物理驱动坐标系,坐标系noτ为逻辑驱动坐标系(noτ为动态坐标,随着接触点的不同而不同)。由于在一个周期T内侧头沿切矢移动为很小的直线段,因此在一个周期T内、物理驱动坐标系zox下的曲线(曲面)仿型运动可简化到逻辑驱动坐标系noτ下的直线(平面)仿型运动。用法矢n上的有向线段OB表示△ε的大小与符号。过△ε的终点B作切矢τ的平行线BQ,在进给方向上与跟随圆的交点为Q;有向线段OQ的方向即是测头运动的合速度V的方向。
在速度圆矢量分解算法中,合速度V的方向完全由△ε确定。当△ε>0(即测头过压)时,测头沿切矢运动的同时向法矢正向运动(离开仿型型面),即在进给运动的同时减小测头变形量;当△ε<0(即测头欠压)时,测头沿切关运动的同时向法矢负向运动(靠近仿型型面),即在进给运动的同时增大测头变形量。由第四节可知,三维测头数控仿型加工有四种仿型方式,限于篇幅,本文介绍一维仿型控制的速度圆矢量分解算法,其它可以类推。
6.三维测头的一维仿型速度分解算法
一维仿型分为zox平面或zoy平面两种,它们的控制算法是一样的,只不过进给轴不同在而已,本文介绍zox平面内的一维仿型控制算法。
测头在zox平面内一维仿型的特征是,沿X轴进行进给动作,y轴的速度始终为零,测头沿z轴进行仿型退让动作,以保证测头在复杂型面的仿型过程中刀具中心始终在zox平面内。亦即仿型速度分解,只能分解到z轴和x轴上。
虽然测头在zox平面内运动,但仿型时测头受到的力往往是三个方向的。速度分解时需综合考虑。若ε0为一维仿型时测头期望变形量,设ε=√(εx2+εy2+εz2),则在逻辑驱动坐标系noτ下根据速度圆矢量分解算法有:
其中V是仿型运动合速度,即给定的仿型速度;Vn是合速度在逻辑驱动坐标轴n上的分速度;Vτ是合速度在逻辑驱动坐标轴τ上的分速度。
由式(2)可知,若测头受到的作用力太大(即测头综合变形大),则测头以合成速度沿法矢n轴方向离开型面;由式(3)可知,若测头受到的作用力大小,则测头以合成速度V沿法矢n轴方向靠近型面;若测头受到的作用力恰当(ε=ε0),则测头以合成速度V沿切矢τ轴运动;其余测头接式(l)计算的合速度进行仿型运动;并且如果仿型进给方向与物理驱动轴x的正方向相同Vτ取“+”号,反之Vτ取“-”号。
上述算法只是将合速度分解到逻辑驱动坐标系noτ下的法矢轴n上和切矢轴τ上,而测头实际运动轴是物理驱动轴z和x,也就是说需要把noτ下的合速度分解到物理驱动轴z轴和x轴上,即需计算物理驱动轴的分速度Vz和Vx。
由于是zox平面内的一维仿型,接触点P处的法矢n与轴z夹角θ∈[-90o ,90o]’坐标系zox与坐标系noτ之间仅存在旋转角度为θ的坐标旋转关系。因此,在坐标系noτ下计算的合速度V(Vn,Vτ)向物理驱动坐标系zox转换的合速度V(Vz,Vx)计算公式为:
其中θ=actan(εx/εz),且θ∈[-90o,90o]。
如果法矢n在坐标系zox的第一象限,则θ∈[0o,90o]。
如果法矢n在zox的第二象限,则θ∈[-90o,0o]。
如果由式(4)计算的x轴运动方向与当前运动方向相反,则令Vx=0,即仿型运动中不允许后退。这样做有益于提高仿型加工精度。仿型控制系统按照上述方法计算出各轴的运动速度后,向数控系统发出指令,完成测头的仿型运动。
7.仿型控制系统的实现
仿型开始时,需要确定仿型所需的各项参数。(1)仿型方式(模态)选择;(2)仿型轴进给轴选择:是zox还是zoy平面仿型;(3)仿型进给方向选择;(4)仿型行进给方向选择;(5)仿型行进给步距倍率选择;(6)仿型速度倍率选择;(7)采样数据是否以文件形式存盘;(8)屏幕显示方式选择。
以上仿型参数都是通过操作面板上的多位旋钮或计算机键盘进行选择,数控系统每64ms通过软件PLC查询各相关旋钮、限位开关及键盘的状态,并记录在数控系统与仿型系统的通讯区,实现上述仿型参数的实时选择与切换。如当前仿型方式是zox平面仿型,可在仿型过程中立即切换到zoy平面仿型;当前仿型行进给方向是沿行进给轴的负方向,可立即切换到行进给轴正方向等等。
仿型控制系统的中断调用属于定时中断,采用中断调用定对器负责CPU工作对象,按预先规定的时刻及优先级进行工作。仿型速度分配是仿型控制中最重要的任务,其优先级最高。根据仿型测量型面跟随中各轴速度调节的要求,要达到理想的加工精度,仿型速度分配周期应为4ms,即每4ms中断调用一次仿型速度分配函数。若仿型速度为300mm/min,则仿型加工理想尺寸精度为:4(ms)*300mm/(60*1000ms)=0.02(mm);考虑到刀具误差、机床运动误差、机床动态响应能力以及测头的测量误差等因素,实际仿型加工精度为±0.O5mm。
CPU空闲时顺次执行机床是否停止、测头是否超量程、仿型是否正常停止以及计算机屏幕显示内容刷新等程序模块;如果上述模块一切正常,则程序回到仿型参数选择与切换模块,以根据动态切换的仿型参数决定下一次仿型的方式。这些程序模块是优先级最低的程序。
一维仿型结束的条件很多,有些是紧急情况下的结束,有些是正常情况下的结束。所有这些产生的仿型结束的条件,当结束条件消失后,仿型过程都是可重入的。紧急情况下的结束,必须立即停止仿型测量与加工。仿型过程紧急结束的条件为:(1)紧急按钮作用;(2)机床锁住按钮作用;(3)机床z轴锁住按钮作用;(4)测头超量程报警;(5)机床极限限位开关作用;(6)机床电器故障报警。仿型过程正常结束的条件为:(1)规定的仿型区域仿型完毕;(2)仿型结束按钮作用。
zoy平面与zox平面内的一维仿型控制流程完全相同,其区别有三点:(1)进给轴不同;(2)行进给轴不同;(3)计算法矢偏转角度的参数不同,此时:
θ=actan(εy/εz),且θ∈[-90o,90o]。
zox平面一维仿型,y轴隐含为行进给轴,行进给方向为y轴的正方向。型面在xoy平面投影边界为粗实线(图中粗曲线所为区域,边界AD、BC为可能的仿型行进给动作发生处,边界CD为仿加工起始处,AB为的自动仿型加工结束处。如果沿zox平面一维仿型,测头运动界AD、BC或人为强制(如点H、F处)发生仿型行进给指令,则仿型控制程序自动调用沿zoy平面一维仿型速度分配模块,进行zoy平面一维仿型,且当测头运动弧长达到指定行进给步距后,切换仿型进给轴的运动方向,再进人沿zox平面一维仿型速度分配模块。仿型过程中操作者通过操作面板上按钮可以随时产生行进给动作,以减少不必要的仿型加工,提高仿型测量效率。也可以随时改变仿型行进给步距的大小及方向,增加不规则型面仿型加工的灵活性。
8.结论
改造后的仿型机床,仿型操作界面友好、方便,学习容易,仿型精度和速度明显提高。除上述几种加工方式外,使用该仿型系统加工的模型,其仿型轨迹可数字化后存入硬盘,并具有比例缩入、阴阳模转换及数控编程与加工等功能。仿型铣的成功改造,为常柴赢得了效益。实践表明,老仿型机床的数字化改造,可以仅化几十万元就可以将老机床改造成国际市场上百万元才能买到的高科技、多功能数控机床,为企业上等级、上品种,加快新品开发创造条件。