1、按运动轨迹分类
(1)点位控制系统
这类控制方式只要求控制工具从一点移到另一点的准确位置,而对运动轨迹原则上不加控制。
(2)直线控制系统
这类控制方式除了控制点与点之间移动的准确位置外,还要保证被控对象在两点之间的移动轨迹是一条直线,同时移动的速度要按照给定的速度进行控制的。
(3)轮廓控制系统
轮廓控制系统又叫连续控制系统,这类控制方式能够对两个以上坐标方向的位移进行严格的不间断的控制。
2、按伺服系统分类
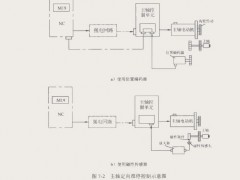
(1)开环控制系统
开环控制系统是指不带反馈装置的控制系统,由步进电机驱动线路和步进电机组成,。数控装置经过控制运算发出脉冲信号,每一脉冲信号都会使步进电机转动一定的角度,同时通过滚珠丝杠推动工作台移动一定的距离,如图2所示。 这种控制系统结构比较简单,工作稳定,容易掌握使用,但精度和速度的提高会受到限制。
(2)半闭环控制系统
半闭环控制系统是在开环控制系统基础上,在伺服结构中加入一个角位移检测装置,通过检测伺服系统的滚珠丝杠转角,从而间接检测移动部件的位移,然后反馈到数控装置的比较器中,与原输入指令位移值进行比较,用比较后的差值进行控制,使移动部件补充位移,直到差值消除为止的控制系统,如图3所示。 这种控制系统所能达到的精度、速度和动态特性优于开环控制系统,为大多数中小型数控机床所采用。
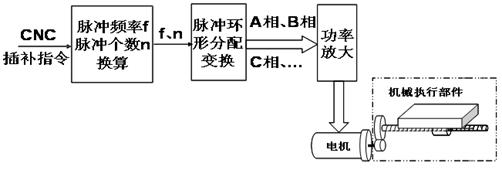
图2 开环控制系统
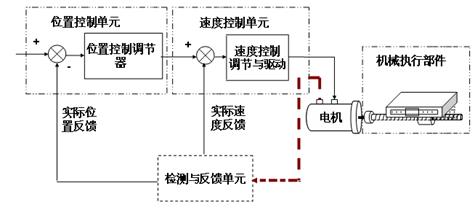
图3 半闭环控制系统
(3)闭环控制系统
闭环控制系统是在机床移动部件的位置上直接安装有直线位置检测功能的装置,将检测到的实际位移量反馈到数控装置的比较器中,与原输入指令位移值进行比较,用比较后的差值控制移动部件作补充位移,直到差值消除时才停止移动,达到精确定位的控制系统,如图4所示。闭环控制系统的定位精度高于半闭环控制,但结构比较复杂,调试维修的难度较大。
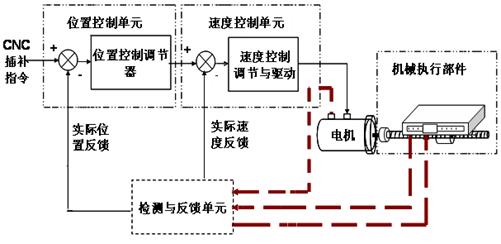
图4 闭环控制系统