MC340/TWIN是德国STAMA公司生产的双主轴加工中心,由于烧毁严重,无法恢复原系统。技术改造工作采用德国SIEMENS-840D控制系统更换原机床配置的日本FANUC-15M系统,涉及到大量的硬、软件技术,文章简略地介绍了有关的改造方法和技术。
MC340/TWIN双主轴加工中心是1994年从德国STAMA公司进口的数控机床,因意外事故几乎报废。我们除对损坏的机械部件修理复原外,还对其控制系统进行了更新式设计、改造。
1 CNC八轴控制
原八轴的控制
原控制系统是日本FANUC-15M系统,其CNC部分直接控制两个主轴(一个电动机驱动两个主轴,即C轴)和X、Y、Z、A四个轴,并通过PLC和STAMA公司自制的接口控制回转工作台(C2轴)、刀库轴(Q轴)和直线运动式机械手轴(V轴)。PLC共占用I/O点为288/192点。C2轴(回转式工作台)分为两个工作区,在一个工作区进行加工的同时,另一个工作区可以装卸工件,两个工作区每循环一次就可以加工出八个工件。另外原机床的换刀有其特殊性,由Q轴(刀库轴)、V轴(直线式机械手轴)和Z轴等三个轴共同配合完成换刀动作。其过程是:当有换刀指令时,Q轴转到正确刀位,V轴带着机械手到刀库取刀,再移动到主轴端,机械手的另两爪抓住主轴上的两把刀,然后通过Z轴向上运动来拔刀,机械手转动180°以后,Z轴又下降将新刀插入主轴,V轴再回到刀库将换下的刀插入刀库原位置。所以换刀全过程涉及到三个轴的运动和机械手的各种动作,以及大量的电磁阀和位置检测元件,整个动作比较复杂。
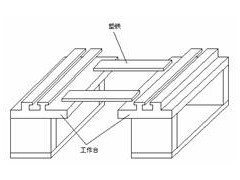
图1
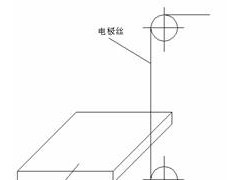
图2
现八轴的控制
由于FANUC-15M系统是对我国禁运的产品,经调研论证后,我们选用了四轴联动的SIEMENS-840D数控系统。主轴和X、Y、Z、A轴直接由CNC控制,可完全达到原来的技术指标。而原PLC控制的C2、Q、V三轴,也改为CNC直接控制。由于选用的西门子标准操作面板不占用外部I/O点,同时伺服电动机内部有专用的位置编码器,节约了大量的I/O点,所以PLC控制占用的I/O点减少到192/160点。实现了原机床的PLC功能,优化了PLC程序,改善了原机床的功能。具体方法如下述。
Q轴的控制方法 原Q轴的控制框图如图1。当CNC发出换刀指令时,通过PLC送出数字指令和各控制信号,通过接口电路转化为模拟指令,再通过西门子驱动器驱动电动机转动。随刀库同步转动、且对应56把刀的绝对编码器ENC2将刀号的粗位置反馈回PLC,达到粗定位的目的,然后再由精密电位器:来精确定位,进而进行后续的换刀工作。在此机械传动链中,以上两个位置传感器均不安装于电动机内。机械传动链示意图如图2。
经过多级齿轮和蜗杆、蜗轮传动,电动机与绝对编码器(ENC2)的传动比为157.357/1,而电动机与精密电位器(R)的传动比为2.81/1,均不为整数。与系统配套的伺服电动机内装有增量编码器,但用来确定刀具位置就不合适了,因为其没有一一对应的关系。在分析了整个刀库传动机构和编码器特性后,我们采用了外置增量式编码器,安装于电位器R的位置,即编码器与刀库的传动比为56:1,这样就可以像X、Y、Z、A轴一样,方便地回到参考刀位(定为1号刀),且每一刀位又和编码器有一一对应关系,这种对应精度又因CNC的128倍频的作用而胜于原精密电位器定位,从而达到了粗精定位两种目的,实现了刀库轴的功能。
V轴的控制方法 原控制框图类似于Q轴控制图,只是没有电位器精定位。V轴位置由绝对编码器(ENC2)来检测。本次改造中V轴的控制也采用直接由CNC控制。由于V轴藏于主轴立柱腔内,不便返回参考点,必须要有位置记忆,因此我们选用了与840D配套的绝对位置编码器来覆盖V轴的全行程,再配合西门子电动机内置位置编码器共同完成V轴的精确定位,达到的控制精度比原来的高。
图3
C2轴的控制方法 C2轴原电气控制精度不高,其精度是由齿盘啮合来保证的。该工作台在0°和180°之间来回转动,控制框图如图3。其位置由0°和180°点上的两个限位开关检测。原理是:CNC发出工作区交换指令后,由PLC译码产生驱动指令,使工作台升起。再经接口板、驱动器驱动电动机按预定方向转动,由多个开关提供电动机需加速、减速和工作台到位与否的信号。工作台到位后,电动机停,工作台降下,完成一次转换过程。本改造中,该轴也改由CNC直接控制的西门子数字伺服电动机来完成。具体的动作过程和原来差不多,不同的是:①由于使用了数控伺服轴,且电动机内配有内装式增量编码器,要正常工作,必须开机回参考点,为了不增加新的元器件,对PLC程序作了特殊的编制,使开机后计算机根据开关状态自动设置坐标值,完成工作台不动作情况下的模拟回零操作。②它虽是作旋转运动,但由于机械结构限制,只能在0°~180°之间来回转动,类似于直线轴的运动特性。所以将其指定为直线轴,方能可靠地限制其在0°~180°之间转动,避免了旋转轴可能产生的360°转动,保证了工作台的可靠性。
PLC控制轴改为CNC控制轴的一些特殊性
原PLC控制轴Q、V、C2 传动机构间隙较大,对位置精度要求不高,因此主要用速度环来控制。改为CNC 控制以后,既有速度环,又有位置环及实时监控,容易产生位置偏差和速度偏差报警,这就增加了调试难度。在改造中,我们一方面加强机械传动链的刚性,另一方面又用加大间隙补偿,加大动静态位置检测公差,适当增大增益和到位检查时间,降低加速度和最大速度等参数设定办法加以克服。
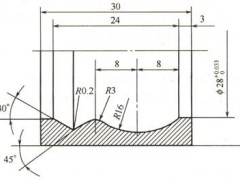
图4
V轴结构不仅间隙大,而且弹性变形大,其结构示意图如图4。其机械手臂约长640mm,所以V轴在运行中的弹性变形通过丝杠随时影响着位置检测,使该轴在快速运动中容易产生振荡。根据这一特点在调试中要适当减小增益,降低速度,增加到位检测时间,方能保证系统稳定。图4
在换刀过程中,要涉及到Q、V、Z三轴运动。V、Z轴之间配合问题不大,Q、V轴的配合却存在一定问题,这是因为机床有双主轴,机械手每次要从刀库抓两把刀,两刀之间又相隔三把刀,加之Q、V轴的弹性变形,所以机械手从刀库取刀时,易产生干涉而报警,除了作上面调试外,还在PLC程序中设定分段的变速运动以克服两轴之间的干涉,保证了换刀可靠性。
2 改造效果
经机械大修和以上控制系统的重新设计改造,恢复了原机床的所有功能,各项技术指标均达到STAMA公司出厂时的要求:如X、Y、Z快移速度达到22m/min,进给速度达到1~10000mm/min,主轴转速6000r/min,还可任意角度定位。X、Y、Z的定位精度为6.546µm、8.254µm、9.621µm( 出厂指标为≤12µm),重复定位精度为3.15µm、3.533µm、3.25µm(出厂指标为≤8µm)。系统控制稳定可靠,机床操作安全方便。