1.数控铣床的分类
自从工业革命以来,机床工业发生了翻天覆地的变化。大多数人了解的是铣床车床和钻床,也就是所说的普通机床,这些设备通过技术工人操作手轮移动刀架使刀具沿正确的方向走刀到零件所加工的位置。普通机床需要通过接受过较长时间的专业培训并且具有一定操作技能的操作者在具备一定条件的环境下才能加工出高质量的零件。相对来说,普通设备的加工效率较低,成本较高。
今天,数控设备在相当多的领域已经完全或逐渐取代了普通设备,与普通机床不同,数控机床加工零件的过程完全自动地进行,加工过程中人工不能干预。因此,首先必须将所要加工件的全部信息,包括工艺过程、刀具运动轨迹及走刀方向、位移量、工艺参数(主轴转速、进给量、切削深度)以及辅助动作(换刀、变速、冷却、夹紧、松开)等,按加工顺序采用标准或规定的程序指令编写出正确的数控加工程序,然后输入到数控设备的控制系统中,随后控制系统按数控程序的要求控制数控机床对零件进行加工。所谓数控编程,一般指包括零件图样分析、工艺分析与设计、图形数学处理、编写并输入程序清单、程序校验的全部工作过程。数控编程可分为手工编程和自动编程两种方式。
数控铣床可进行钻孔、镗孔、攻螺纹、轮廓铣削、平面铣削、平面型腔铣削及空间三维复杂型面的铣削加工。加工中心、柔性加工单元是在数控铣床的基础上产生和发展起来的,其主要加工方式也是铣加工方式。
数控铣床可按通用铣床的分类方法分为以下3类:
(1)数控立式铣床
数控立式铣床主轴轴线垂直于水平面,这种铣床占数控铣床的大多数,应用范围也最广。目前三坐标数控立式铣床占数控铣床的大多数,一般可进行三轴联动加工。
(2)卧式数控铣床
卧式数控铣床的主轴轴线平行于水平面。为了扩大加工范围和扩充功能,卧式数控铣床通常采用增加数控转台或万能数控转台的方式来实现四轴和五轴联动加工。这样既可以加工工件侧面的连续回转轮廓,又可以实现在一次装夹中通过转台改变零件的加工位置也就是通常所说的工位,进行多个位置或工作面的加工。
(3)立卧两用转换铣床
这类铣床的主轴可以进行转换,可在同一台数控铣床上进行立式加工和卧式加工,同时具备立、卧式铣床的功能。
2.数控铣床的主要加工对象
(1)平面类零件
平面类零件的特点表现在加工表面既可以平行水平面,又可以垂直于水平面,也可以与水平面的夹角成定角;目前在数控铣床上加工的绝大多数零件属于平面类零件,平面类零件是数控铣削加工中最简单的一类零件,一般只需要用三坐标数控铣床的两轴联动或三轴联动即可加工。在加工过程中,加工面与刀具为面接触,粗、精加工都可采用端铣刀或牛鼻刀。
(2)曲面类零件
曲面类零件的特点是加工表面为空间曲面,在加工过程中,加工面与铣刀始终为点接触。表面精加工多采用球头铣刀进行。
3.数控铣床的坐标系
为了描述点在平面和空间中的位置,首先需要定义一个确定方向和相对位置的坐标系,数控机床的坐标系采用右手直角笛卡儿坐标系。它规定直角坐标X、Y、Z三个坐标轴的正方向用右手法则判定,围绕各坐标轴的旋转轴A、B、C的正方向用右手螺旋法则判定。数控加工采用的是空间三维坐标系,三维坐标系是在二维即平面坐标系的基础上增加了一个垂直方向的轴,通常称之为Z轴,为平行于机床主轴的坐标轴,如图1所示。
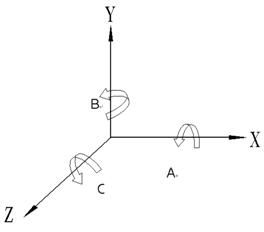
图1 数控铣床的坐标系
(1)建立加工坐标系的步骤
为了在数控设备上加工零件,首先需要确定工件在机床上的位置,因此,必须建立一个与加工零件相关的坐标系,虽然数控设备的优势在于允许或者机床上、或者工件上、或者夹具上的任何位置都可以作为数控编程的零点而建立坐标系,但最佳的解决方案选择既简单又方便定位的位置,这样操作者通过按控制面板上的几个按钮就可以完成建立加工坐标系了。具体操作可以简单的定义为以下几个步骤:
① 根据数控编程坐标系或加工坐标系确定零件坐标系的位置和坐标轴的方向。
② 利用零件和夹具上定位面建立加工坐标系。
③ 校正加工坐标系,通过校正加工坐标系,使建立的加工坐标系满足数控加工的要求。
(2)建立加工坐标系的要素
几何元素点、线、面对找正和校正加工坐标系非常有用,一个关键的因素是可以确定零件和夹具上的特征位置,进而确定加工坐标系的位置。在实际操作中,零件和夹具上的定位面、定位孔等经常作为找正和校正加工坐标系的主要手段,这主要基于通过简单的几何运算就可以将机床坐标系和零件坐标系联系起来。以下是建立加工坐标系的三个要素。
① 确定坐标平面:选择和找正定位面确定工作平面的方向和位置。
② 确定坐标轴方向:平移或旋转所测量的元素作为方向矢量确定加工坐标系的坐标轴方向,旋转元素需垂直于已找正的元素。这控制着轴线相对于工作平面的旋转定位。
③ 确定坐标系原点:作为定义X、Y、Z坐标轴的原点或零点。
4.数控铣床的零点
数控程序的刀位点位置和刀位矢量确定依赖于加工坐标系的位置,所以,在加工零件前必须确定加工坐标系或编程坐标系的准确位置。
在普通设备上加工工件时,操作技师通常使用刀具的刃边或刃口来确定工件的边缘位置作为加工的零点,然后用机床刻度盘的刻度值或者数字显示器显示的读数通过简单的数学运算来确定工作坐标系的零点,所有的位置都以此点作为参考点,这也就是加工坐标系的由来。
数控铣床和普通铣床的工作原理是一样的:加工前必须确定工件在机床上的位置,或者用刻度盘值或者用位置数字显示器的数值给零件定位。然后,操作者通过按数控机床控制面板上的按钮来建立加工坐标系,也就是通常所说的零点。只不过零点的位置确定通过数控设备控制系统内部的运算来完成。
在数控铣床上建立工件的加工坐标系,是为了确定工件在加工坐标系中的准确位置,首先应该了解两个零点的概念,它们分别是机床坐标系原点和加工坐标系原点。
数控铣床都有一个参考点,也就是通常所说的机床坐标系原点或机床的初始位置,是由机床制造商设置在机床上的一个固定基准位置点,通过限位开关或传感器来建立。作用是使机床与控制系统同步,建立测量机床运动的起始点。从实际意义上讲,机床零点是固定不变的,通常在机床的右上方。当机床启动后,机床必须执行返回到机床零点的固定循环程序即初始化程序,然后将机床参考点和机床原点之间的偏置值自动存储在机床控制单元MCU(Machine Control Unit)中。
对于数控编程和数控加工来说,还有一个重要的原点是程序原点,是编程员在进行数控编程时定义的几何基准点,并以此点作为加工坐标系的原点,即通常所说的工件原点。工件坐标系是零件进行数控编程时确定的加工坐标系。
5.数控铣床偏置
(1)机床偏置的概念
机床零点和工作零点之间的距离,叫做偏置,如图2所示。每个坐标轴都有互相关联的各自的偏置值,该值存储在机床控制单元的偏置寄存器中。在进行零件数控加工时,机床控制单元将一直存储这些偏置值,并利用这些偏置值自动跟踪和移动刀具到正确的位置。偏置值也可以在机床控制单元中进行编辑或调整。例如:在X-偏置值上加1mm,则整个坐标系就会向X正向移动1mm,一种常见的控制工件加工质量而进行的调整方法。
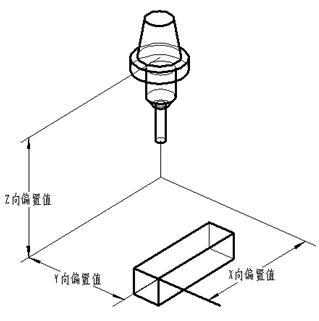
图2 机床偏置示意图
(2)机床坐标系的设置和偏置
现在,大多数数控机床都能建立多个工件偏置来定义多个工件坐标系。事实上,即便加工同一个工件需要建立多个工件坐标系,也无需完全重新建立工作坐标系。该任务可以通过设置G代码或G指令来完成工件的偏置。最常用的坐标系设置指令为G54,其他坐标系设置指令为G55~G59等。如图3所示的X轴偏置值和Y轴偏置值即为G54指令所设定的工作坐标系。
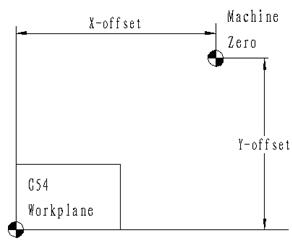
图3 偏置值和坐标系
其他的工作坐标系设置,如G55指令所定义的工作坐标系可以存储在同一个坐标工作平面如G54中,如图4所示,选择G55指令也就是通常所说的建立另一个工件坐标系G55。
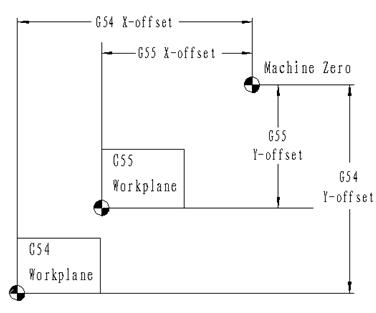
图4 机床坐标系与加工坐标系
建立另一个工件坐标系指令代码可以是常见的G54~G59,也可以为其他的G代码,完全取决于机床制造商为偏置值而设定的G代码定义格式。必须在你的零件程序中使用该代码定义偏置值或坐标系。调出定义工件偏置值的G代码通常在绝对的安全位置如在程序开始部分:
O1111;
N5 G54 G90 G40 G70;
或者在换刀后:
N20 M06 T09;
N25 G54 G00 X50.0 Y20.0 Z100.0;
设置工件偏置必须通过刀尖或刀具刃部接触零件或其他方法来完成,所定义的工件各轴的偏置值X、Y、Z存储在机床控制单元的寄存器中。若查看数控机床控制面板上的偏置记录,如下表所示。
表 坐标系偏置值
Designation | X-offset | Y-offset | Z-offset |
G54 | -30.221 | -65.864 | 0 |
G55 | -7.987 | -33.366 | -9.873 |
G56 | -15.765 | -7.832 | -35 |
G57 | -50.352 | -0.788 | -8.963 |
(3)工件偏置的作用
在数控编程过程中,为了避免尺寸计算,需要多次将工作坐标系进行适当的平移、旋转。一般数控机床可以预先设定6个(G54~G59)工件坐标系,这些坐标系的坐标原点相对于机床原点的坐标偏置值存储在机床控制单元中,在机床进行回零操作或初始化后仍然存在,一旦程序中指定了该G指令,数控系统即指定并调出该坐标系作为当前的工件坐标系,该工件坐标系原点即为当前程序原点,后续程序中工件移动坐标值均为相对该坐标系原点的坐标值。
(4)Z坐标偏置和刀具长度偏置
Z 轴的坐标偏置值由于主轴上装有刀具而使得Z方向的偏置值设置变得复杂一些,因为该偏置值是机床原点到工件坐标系原点之间的Z轴的偏置值,而不是铣刀刃端到工件坐标系之间的Z轴偏置值。相对来说,X、Y两个轴偏置值的测量和设置相对简单一些,因为操作者可以试着把机床主轴的中心线与工件的边缘对齐。Z坐标偏置值设置则有一些不同之处,原因是数控铣床主轴上装有刀具,因而不得不考虑刀具对Z轴偏置值的影响。刀具长度偏置成为解决这个问题的有效方法。
当控制系统执行程序中的指令使Z轴到达指定的水平位置时,控制系统要做的工作是将程序中的坐标点的数值和刀具长度偏置值都加到Z轴的坐标偏置值中。例如:
控制系统执行的数控程序为:G01 Z-100.0;
Z坐标偏置值为:-12.5;
刀具长度偏置值为:35.8;
则控制系统执行该程序段时迅速进行如下数学运算:
机床Z位置=-100.0+(-12.5)+35.8=-76.7
然后主轴带动刀具移动到该位置。
机床控制系统只执行运动控制点的机床绝对位置也就是机床坐标系的绝对坐标值,而所有的其他数值的作用只是使数控编程和刀具设置变得简单罢了。
当运行数控程序时,数控系统根据刀具长度偏置值使刀具自动离开工件一个适当的距离,来完成刀具长度偏置工作。
在加工过程中,为了控制切削深度或进行试切加工,常常采用加大刀具长度偏置值的方法,以控制刀具的切削深度,而不需重新修改数控程序。
6.刀具参数预设置
刀具预设置常常用来设置最新安装的刀具参数包括长度偏置值、直径值等。设置的方法有试切法、机床内部对刀法、机床外部对刀法,下面介绍最常见的对刀仪测量法。
(1)对刀仪测量法
对刀仪测量法为机床外部对刀法,其目的是在数控机床外部预先设置刀具参数,而不需将数控机床停下来,手动方式使刀具触及到工件来进行刀具参数设置。
对刀仪上有一个预先装好的、与刀柄相配合的锥孔,对刀时先将刀具安装到刀柄上,再将装有刀具的刀柄插到对刀仪的配合锥孔中;然后使用一个无接触光学系统来测量刀具,无接触光学系统通常为一个剖面投影仪,它能通过较大的放大倍数允许操作者测量刀具参数。对刀仪上的光学放大镜可以聚焦刀具的刃端,记录聚焦后的刀具长度偏置值、刀尖圆角和直径值等刀,如图5所示刀具参数;最后将所有的刀具参数值手工输入或通过系统传输到机床控制系统偏置值寄存器中,这样,精确的数控加工就可以开始了。
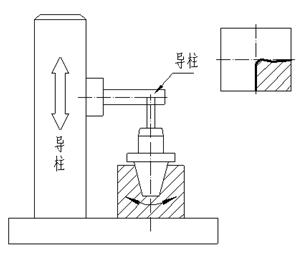
图5 对刀仪示意图
(2)机外对刀仪的组成
● 刀柄定位机构
对刀仪的刀柄定位机构与标准刀柄相对应,它是测量的基准,所以要有很高的精度,并与加工中心的定位基准要求一样,以保证测量和使用的一致性。定位机构包括回转精度很高的主轴、使主轴回转的传动机构和使主轴与刀具之间拉紧的预紧机构3部分。
● 测头与测量机构
测头有接触式和非接触式两种,接触式测头直接接触刀具的主要测量点(最高点和最大外圆处);非接触式主要用光学的方法,把刀具投影到屏幕上进行测量。测量机构提供刀刃的切削点处的Z轴和X轴尺寸值,即刀具的轴向尺寸和径向尺寸,测量的读数有机械式(如游标刻线尺)的,也有数显和光学式的。
● 测量数据处理装置
测量数据处理装置的作用是将刀具的测量值自动打印出来,或与上一级管理计算机联网,进行柔性加工,实现自动修正和补偿。
同其他的如手动使刀具接触或试切工件边缘的方法相比,采用对刀仪测量刀具参数的方法更加精确、快捷。通常,手工移动主轴使刀具接触或试切工件边缘的方法受很多情况的限制,如实际刀具的精度、工件试切边缘的精度以及操作者的测量手法等。另一方面,使用对刀仪测量刀具直径偏置比单纯输入一个刀具直径值更精确,操作者和编程员必须考虑到主轴的旋转精度问题,因为实际加工过程中刀具是随主轴一同旋转的。
精度较高的机外对刀仪所配置的系统具有更多的功能,使用更加方便。例如:刀具参数通过数据交换系统自动传输到机床控制系统中,直接成为操作者所需要的刀具参数,这样,就不需要操作者将刀具参数手工输入机床控制单元中,可以避免人为错误的发生。
机外对刀仪主要用来测量刀具的长度、直径、刀具形状、角度。对于加工中心刀库中存放的刀具其主要参数都要有准确的值,这些参数值在编制加工程序时都要加以考虑。使用中因刀具损坏需要更换新刀具时,用机外对刀仪可以测出新刀具的主要参数值,以便掌握与原刀具的偏差,然后通过修改刀补值确保其正常加工。此外,用机外对刀仪还可测量刀具切削刃的角度和形状等参数,有利于提高加工质量。
(3)刀具参数测量注意事项
● 使用对刀仪应注意的问题
使用前要用标准芯轴进行校准。每台对刀仪都随机带有一个标准的对刀芯轴,要妥善保护使其不锈蚀或受到外力作用而变形。每次使用前都要对轴向和径向尺寸进行校准。
● 静态刀具参数测量值的修正
静态测量的刀具尺寸和实际加工出的尺寸之间有一差值。影响这一差值的因素很多,主要有:
·刀具和机床的精度和刚度。
·加工工件的材料和状况。
·冷却液和冷却系统的状态。
·使用对刀仪的技巧和熟练程度等.
由于以上原因,静态测量的刀具尺寸应大于加工后的实际尺寸,因此对刀时要考虑一个修正值,这要由操作者的经验来预选,一般要偏大0.01~0.05mm。
● 工件坐标系原点的修正
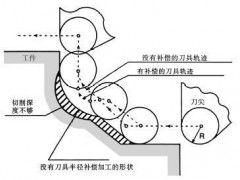
零件找正或夹具定位装夹后,必须正确测定工件的编程原点在机床坐标系中的坐标值,然后输入到偏置寄存器中。进行试切削时,由于现场环境等因素的影响,如机床的重复定位精度。即便使用同一程序加工,实际加工尺寸也可能因为加工条件的变化而出现较大的偏移,这时可根据实测的结果进行修正,直至满足零件技术要求为止,最终使得刀具运动轨迹与数控编程轨迹完全重合,必要时为了提高工件的加工精度,也可以采用以上方法进行刀具补偿修正。