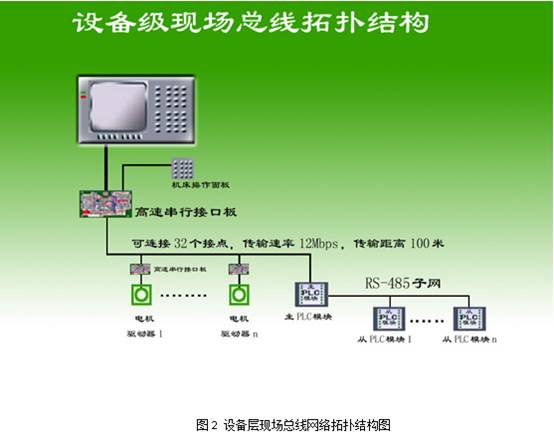
该系统是一个基于标准PC硬件平台和LINUX与RTLinux结合的软件平台之上,设备驱动层采用现场总线互连、与外部网络或INTRANET采用以太网连接,形成一个可重构配置的纯软件化结合多媒体和网络技术的高档开放式结构数控系统平台。
该平台数控系统运行于没有运动控制卡的标准PC硬件平台上,软件平台采用LINUX和RTLINUX结合,一些时间性要求严的任务,如运动规划、加减速控制、插补、现场总线通讯、PLC等,由RTLINUX实现,而其他一些时间性不强的任务在LINUX中实现,详见图1软件结构框图。
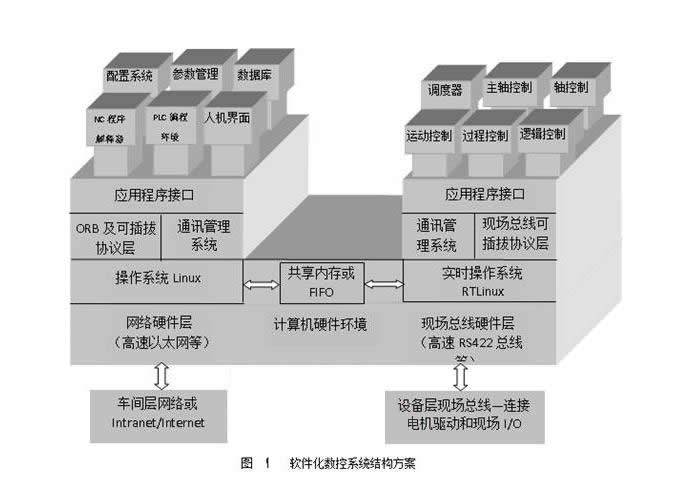
基于标准PC的控制器与驱动设备和外围I/O的连接采用磁隔离的高速RS422标准现场总线,该总线每通道的通讯速率为12Mbps时,采用普通双绞线通讯距离可达100米。主机端为PCI总线卡,有四个通道(实际现只用两个通道-一个通道连接机床操作面板,另一通道连接设备及I/O),设备端接口通过DSP芯片转换成标准的电动机控制信号。每个通道的控制节点可达32个,每个节点可控制1根轴(通过通讯协议中的广播同步信号使各轴间实现同步联动)或一组模拟接口(测量接口,系统监控传感器接口等)或一组PLC I/O(最多可达256点),PLC的总点数可达2048点(可参见图2 现场总线网络拓扑结构)。