无导轨坐标测量系统也称为柔性坐标测量机(Flexible Coordinate Measuring Machine),是上世纪八十年代出现并得到迅速发展的一门新兴测量技术。无导轨坐标测量系统源于大地测量技术。新技术的发展与应用赋予了传统的大地测量技术许多崭新的内容和应用空间,测量功能的不断完善和测量精度的不断提高使其可以广泛应用于工业测量领域,成为大尺寸测量技术中一个极为活跃的分支。无导轨坐标测量系统能够在测量现场即时建立坐标系并进行精密测量,可用于大型工件的尺寸测量、重型机械的装配控制、工作部件的大范围动态跟踪测量、大型零部件的面形(飞机翼面、汽车外形、大口径光学透镜表面等)测量等。无导轨坐标测量系统可分为三种类型:多站组合式数字经纬仪测量系统、激光跟踪测量系统和大视场视觉测量系统。
(1)多站组合式数字经纬仪测量系统
上世纪八十年代,数字经纬仪逐步替代了光学经纬仪,使经纬仪的测量精度及自动化程度大大提高,并出现了专门用于工业测量的多站组合式数字经纬仪测量系统。该系统的工作原理基于三角测量法,系统由2~8台数字经纬仪及计算机组成,可以在测量现场即时安装、定标和测量。典型产品如KERN公司的Space测量系统,可用一根校对尺在测量现场定标,确定系统常数和坐标原点,用半导体激光投射器进行目标点定位,采用CCD瞄准。这种系统可用于航空航天、船舶制造、重型机械等领域,角度精度达0.3″,在3米内的测量精度为50μm,测量速度可达500点/小时。
采用两束激光进行测量的激光三角测量法是多站式经纬仪测量法的一种延伸。该方法以靶镜为目标,两束激光始终对准靶镜,根据两束激光的夹角即可计算出被测距离,系统的重复性可达10μm。
(2)激光跟踪测量系统
激光跟踪测量系统实际上是一台激光干涉仪,在测量光路中设置了一套可同时绕水平轴和垂直轴旋转的反射镜((或将激光头整体置于两个旋转轴上),当测量靶镜在空间自由运动时,反射镜进行自动跟踪,以保证测量光路的连续性。
根据测量方法的不同,激光跟踪测量系统又可分为多边测量系统和球坐标测量系统。多边测量法采用四套(或四套以上)激光跟踪系统,当测量靶镜移动时,四束测量激光进行实时跟踪,根据四个距离值来确定测量靶镜的瞬时位置。值得注意的是,一般来说,在一个坐标系中只需知道某点到三个固定点的距离,即可计算出该点的实际位置,而该方法可提供四个距离值,使测量信息更为丰富。将“冗余技术”引入测量中,不仅提高了测量的稳定度,而且可以迅速完成自标定,确定各套激光跟踪系统的相对位置。据报道,这种测量方法的精度可达10μm。
如果在激光跟踪测量系统反射镜的水平轴和垂直轴上安装上码盘,即可构成一套完整的球坐标测量系统,其测量靶镜的位置由矢径及方向角确定。球坐标测量系统的测量范围可达30米以上,测量精度达10ppm。典型的定型产品有Leica公司的Smart系统、API公司的激光跟踪干涉仪、FARO公司的绝对测量跟踪仪等。
(3)大视场视觉测量系统
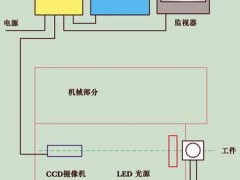
大视场视觉测量系统采用摄像测量法,为了提高测量精度,往往与光学测头同时使用。光学测头是由多个大功率发光管排列组成的光靶,测量时,光学测头与被测工件接触,视觉测量系统实际瞄准的是光学测头,然后根据测量结果计算出实际被测值。视觉测量系统的典型产品有METRONOR公司的SCS和DCS系统,最大测量范围为14m。
视觉测量系统可分为单目和双目二种系统,前者用于尺寸测量,后者则利用了几何光学中的体视角原理,根据不同视角方向的二维图像,通过相关或匹配运算重建三维坐标数据,即可得到被测工件的三维形状。
采用结构光的视觉测量方法也已逐步应用于大尺寸测量中,如GOM公司的ATOS三维数字化测量仪的测量范围可宽达10mm~10m。
计算机、传感器、激光、自动控制、图像处理等高新技术的发展为无导轨坐标测量系统提供了广阔的发展空间,近二十年来,无导轨坐标测量系统发展极快。一方面,许多新技术已转化为定型产品,应用于实际测量;另一方面,在测量实践中又出现了许多更新、更难的课题需要量仪设计者去研究解决,例如:如何合理设计激光跟踪系统的测量靶,如何建立视觉测量法中的图形拼接函数,如何提高图像测量精度等等,这些都是当前国内外学者十分关注的问题。