1 引言
并联机床(Parallel Machine Tools)也称为虚(拟)轴机床(Virtual Axis Machine Tools),是并联机器人技术与现代数控机床技术相结合发展起来的一种新型机床,它同时具有机床和机器人的诸多特性。二十世纪九十年代,美国、英国、德国、俄罗斯、瑞典、瑞士、日本等工业发达国家的有关研究机构和机床厂家纷纷推出具有不同结构型式和功能特性的并联机床。并联机床的问世使机床行业取得了突破性进展,引起了世界各国机床制造厂商和研究机构的广泛关注被誉为“机床结构的重大革命”, 21世纪的新一代数控加工装备”。
并联机床出现至今只有不到十年的发展时间,其理论研究和应用技术研究尚不够成熟,还有许多技术难题需要解决。此外,在研究手段、设计环境上也有待进一步完善与发展。并联机床具有机构型式多样、运动学和动力学设计复杂、计算量大等特点,各种设计分析活动必须采用计算机及多种工具软件,设计环节分散,且各环节间相互影响,数据模型的映射和演变存在障碍,以致一些最新的理论和技术成果难以迅速应用,设计周期长,设计成果不易积累。因此,迫切需要一个统一的、集成的设计环境来解决上述问题。并联机床虚拟产品设计系统正是为满足这一需求而提出并开发的。
2 并联机床虚拟产品设计系统的构成与功能
系统基本框架
并联机床虚拟产品设计系统(Virtual Product Design System for Parallel Machine Tools,PMT-VPDS)将为设计者提供数字化的设计开发环境,提供包括并联机构概念设计、运动学设计、整机设计、动力学分析、精度设计、可制造性分析、作业过程仿真与性能分析等方面的分析和设计平台;为研究者提供并联装备设计方法研究、工作性能分析和作业工艺优化的研究平台;为用户提供并联机床或各种井联类装备的作业过程、作业效果、作业能力、作业性能演示平台。简言之,PMT-VPDS系统可同时满足并联机床的设计者、研究者和用户三方的需要。
并联机床虚拟产品设计系统的基本框架如图1所示。系统主要由三个设计平台(机构概念设计与运动学设计平台、整机组合设计与动力学设计平台和作业运动仿真与性能分析平台少、系统界面(人机交互界面、计算机仿真和虚拟现实界面)和数据库或数据文件(并联机构型谱库、井联机构实体模型、子装配体模型库等)组成。
三个设计子系统
并联机构概念设计和运动学设计子系统
该子系统可提供并联机构概念设计和机构运动学分析与设计的功能。机构概念设计包括构型综合和构型选择。运动学分析和尺度综合以并联机构型谱库提供的设计算法和程序为基础,进行优化设计,可得到满足机床需要的机构参数。
整机组合设计与动力学设计子系统
该子系统可提供并联机床整机辅助组合设计、动力学分析与设计及精度综合功能最终可给出满足设计要求的、带公差的、可装配数字化样机的机床实体模型。
作业过程仿真与作业性能分析子系统
该子系统可提供并联机床数字化样机的机床作业过程仿真和工件切削成型仿真,并且进行机床作业的性能分析评价机床比能优劣,获得工艺优化的相关信息。
3 并联机床虚拟产品设计系统的开发
系统开发环境
PMT-VPDS系统采用Unigraphics作为开发平台,在利用Unigraphics自身功能的基础上进一步开发适用于并联机床设计开发的专用功能。
Unigraphics的二次开发工具使用了Visual C++ 6.0软件。型谱库、零件库、组件库等数据库中的数据以数据文件形式存放于系统环境变量制定的目录中,系统环境变量在安装系统时设置,用于存放PMT-VPDS系统的各种文件和信息。
设计项目管理
为对设计过程进行有效管理.提出了设计项目的概念。设计一台满足一定设汁要求的并联机床的整个过程可称为一个设计项目。每次开始设计一台并联机床时,都必须首先建立或打开一个设计项目,与该并联机床相关的各种设计信息(如设计要求信息、构型信息、运动学设计相关文件、机构实体模型、整机实体模型、动力学设计相关文件、精度设计相关文件等)均按项目进行管理和调用。
项目文件的组成结构如图2所示。各分支分别代表一个文件目录名或文件名,各目录下分别存放相应的设计文件。
系统可提供项日管理功能包括创建新项目打开已有项目、修改项目设计需求信息、查询项目信息、删除项目等。图3为创建新项目操作中的一个功能对话框,用于输入需要的项目如运动能力驱动及速度要求等。打开已有项日功能可列出所有设计项目,从中选择需要设计的项目。显示项目信息功能可列出项目设计的相关信息,包括机构选型信息、整机设计信息整机作业仿真信自等。
并联机构型谱库
型谱库在PKM-VPDS系统中具有重要作用型谱库用于存放各种成熟的并联机构构型及相关的设计信息,包括机构标识名、机构形式化描述、机构实体模型、自由度及姿态实现能力、机构运动学优化算法及程序、机构动力学设计等。在机构设计平台中进行构型设计时.需根据各构型的主要性能指标从型谱库中选择构型方案;在进行尺度综合时,需从型谱库中选择己有机构的设计算法和相应程序进行优化设计。此外,在进行整机动力学设计、精度设计时,同样可将型谱库中已有的机构设计算法和相应程序作为设计基础。因此,型谱库是对已有研究成果的积累和延续,可以为后续设计奠定良好的设计基础,并尽可能决地应用最新的理论研究成果。
并联机构概念设计与运动学设计平台的原型开发
以型谱库为基础,开发出并联机构概念设计与运动学设计平台的原型。设计者可从型潜库中选择已有构型开始设计,也可以利用以并联机构组件库和零件库为基础的组合式开发环境,进行新构型的设计。
并联机构组件库与零件库
结构形式的多样性是并联机床区别于传统机床的显著特点之一。不同的并联机构可以由数目一定的相同组件按照不同的拓扑关系组合而成。组件是指由多个零件、运动副(或仅由零件)构成的组合件,并联机构组件库则是与并联机构相关的组件集合。
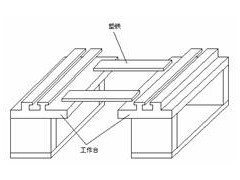
并联机床的机构组件可分为三类:①支链类:指构成并联机构基础和动平台间支链的结构,包括滑块滑轨类、伸缩腿、定长杆等;② 平合类:指构成基础平台和动平台的结构,包括固定铰链平台和滑轨式平台;③ 除以上两类之外的其它组件、如刀头刀架组件等。
并联机构零件是指构成并联机构组件的基本零件,并联机构零件库则是并联机构零件的集合。
并联机床机构原型的构成如图4所示。
系统提供了对组件库和零件库进行管理的功能。
并联机构的组件库和零件库均以参数化的形式进行存储,可以修改设计参数。利用并联机构组件和零件能够决速构造并联机床的机构原型从而缩短并联机床的概念样机设计周期。
并联机构组合设计与分析
以并联机构组件库和零件库为基础,系统提供了组合设计的功能。从组件库中选择适当的组件,调整组件位置和参数,即可完成并联机构的实体模型建模。如没有满足要求的合适组件,可从零件库中选择零件组成需要的组件。此外,系统还提供机构形式化描述自动分析功能.以字符串形式输入机构形式化描述.系统可自动选择需要的建模组件。
图5为利用组件库和零件库设计的4自由度并联机构,其中使用的零件全部来自于组件库和零件库。
其它功能
利用Unigraphics本身的功能可以进行并联机构的运动仿真,井进行运动学分析和动力学分析(如位移、力、速度、加速度分析等)。
对于存放在型谱库中的已经过运动学设计的并联机构,可从系统提供的界面中直接选择并调用(或打开其它工具软件选择并运行)运动学尺度综合程序,优化浏几构的设计参数。
4 结语
本文提出的并联机床虚拟设计系统为并联机床提供了统一的、集成的虚拟设计环境,可以缩短并联机床的设计周期.综合应用并联机床设计各方面的理论和方法,从而对并联机床的理论研究、工程设计、推广应用起到一定的促进作用,推动并联机床的产业化进程。
系统的机构概念设计与运动学设计平台原型已基本开发完成.建立了项目管理体系,以型谱库、组件库、零件库为基础实现了井联机床的机构建模及分析.为后续进行整机设计和整机作业仿真及睦能分析奠定了基础。