一个尚未定位的工件,其空间位置是不确定的,均有六个自由度,如图3-4所示,即沿空间坐标轴x、y、z三个方向的移动和绕这三个坐标轴的转动(分别以 ![]() 、
、![]() 、
、![]() ;和
;和 ![]() 、
、 ![]() 、
、 ![]() 表示)。
表示)。
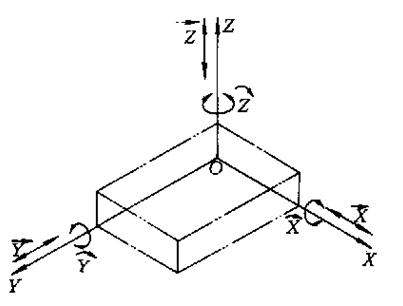
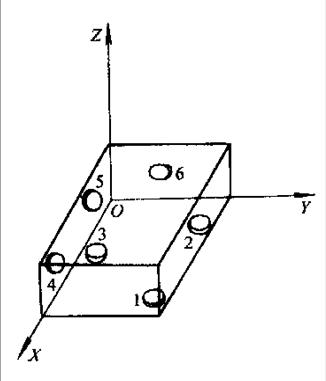
图3-4 工件的六个自由度 图3-5 长方体形工件的定位
定位,就是限制自由度。如图3-5所示的长方体工件,欲使其完全定位,可以设置六个固定点,工件的三个面分别与这些点保持接触,在其底面设置三个不共线的点1、2、3(构成一个面),限制工件的三个自由度: ![]() 、
、 ![]() 、
、 ![]() ;侧面设置两个点4、5(成一条线),限制了
;侧面设置两个点4、5(成一条线),限制了 ![]() 、
、 ![]() 两个自由度;端面设置一个点6,限制
两个自由度;端面设置一个点6,限制 ![]() 自由度。于是工件的六个自由度便都被限制了。这些用来限制工件自由度的固定点,称为定位支承点,简称支承点。 用合理分布的六个支承点限制工件六个自由度的法则,称为六点定位原理。
自由度。于是工件的六个自由度便都被限制了。这些用来限制工件自由度的固定点,称为定位支承点,简称支承点。 用合理分布的六个支承点限制工件六个自由度的法则,称为六点定位原理。
在应用“六点定位原理”分析工件的定位时,应注意以下几点:
(1) 定位支承点限制工件自由度的作用,应理解为定位支承点与工件定位基准面始终保持紧贴接触。若二者脱离,则意味着失去定位作用。
(2) 一个定位支承点仅限制一个自由度,一个工件仅有六个自由度,所设置的定位支承点数目,原则上不应超过六个。
(3) 分析定位支承点的定位作用时,不考虑力的影响。工件的某一自由度被限制,并非指工件在受到使其脱离定位支承点的外力时,不能运动。欲使其在外力作用下不能运动,是夹紧的任务;反之,工件在外力作用下不能运动,即被夹紧,也并非是说工件的所有自由度都被限制了。所以,定位和夹紧是两个概念,绝不能混淆。