



在数控机床中的进给伺服系统,实质上就是一个调速系统,外加一个位置控制环构成的,在直流伺服系统中,常用的有晶闸管调速系统和晶体管PWM脉宽调制系统两类。在直流伺服系统中,现在大多采用永磁式直流伺服电动机。
直流电动机的机械特性公式为
![]()
公式中n为电动机转速;Ua为电动机电枢端电压;Ce为反电势常数;φ为电动机磁通量;Ra为电枢电阻;Cm为力矩常数;M为电磁转矩。
因此直流电动机的调速方法,可以有三种方法:
(1)改变Ua,即改变电枢电压,此方法可得到调速范围较宽的恒转矩特性,适用于进给驱动和主轴驱动的低速段。
(2)改变磁通量φ,此方法可得到恒功率特性,它不适用于进给驱动,且永磁式直流电动机φ是不可变的。
(3)改变电枢回路的电阻Ra,此方法得到的机械特性较软,且不能实现无级调速,也不适用于数控机床。
在数控机床的进给驱动中,实际均采用的是改变电枢电压Ua的调速方法。
1.晶闸管直流调速系统
图1所示为晶闸管双闭环调速系统的框图。该系统由电流环和转速环双环组成。图中的速度调节器和电流调节器均是由线性集成放大器和阻容元件构成的PI调节器。IR为电流环的输入值,来自速度调节器的输出。IF为电流的反馈值,检测的是电动机电枢回路电流。VR是速度环的给定值,来自CNC系统的运算结果再经D/A转换后的模拟量参考值,一般取0-±10V直流电压。速度反馈元件可以采用测速发电机或脉冲编码器直接装到电动机的轴上,测速发电机发出的电压Uf,直接可以和Ur进行比较;而脉冲编码器发出的脉冲频率要经过频率/电压变换,转变为模拟量的电压值,再与Ur进行比较。
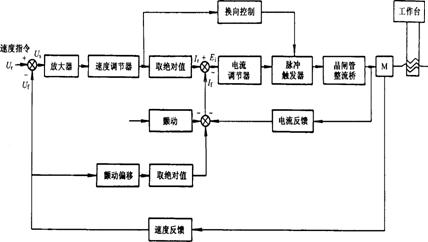
图1晶闸管双闭环调速系统的框图
在双闭环调速系统中,最外环(速度环)起主导作用,当速度指令信号Ur增大时,Us增大,速度调节器的输出加大,IR也随之加大,从而使电流调节器的输出也加大,使脉冲触发器的脉冲前移,即晶闸管触发角前移,导通角增大,使SCR整流桥输出的直流电压增大,使电动机转速上升。当转速上升到Uf=UR时调节过程结束,系统达到稳态运行。当系统受到外界干扰时,如负载增加,转速下降,UF减小,US增大,同样经过这样一个调节过程,使转速回升到原稳态值,实现转速的无静差。
而电流环的作用,主要是在起动和堵转时,限制最大电枢电流,另外当扰动发生在内环之中时,如电网下降时,整流器输出电压随之降低。在电动机转速由于惯性未来得及变化之前,首失引起回路电流减小,反馈电流IF减小,E![]() 增加,电流调节器输出增加,使晶闸管的触发角前移,使整流电路的输出电压回升。当IF又回升到原值时,调节过程结束,实现电流的无静差。
增加,电流调节器输出增加,使晶闸管的触发角前移,使整流电路的输出电压回升。当IF又回升到原值时,调节过程结束,实现电流的无静差。
这种双闭环调速系统,由于在低速时,整流器输出电压低,晶闸管的导通角小,整流器的输出电压和电流波形是断续的,机械特性会有一段非线性,为此可在电枢回路中串接平波电抗器,以减小电流的脉动。另外在伺服单元中也可以增加电压变化率环和电流变化率环,组成多闭环的系统,也可使系统的静特性和动特性得到很大的改善。
