
1、摩擦误差产生原因
(1) 高速时,速度指令大→电机转矩大于摩擦力,不会造成摩擦误差。低速时,速度指令小→电机转矩小,当电机转矩小于摩擦力时,电机在旋转,但工作台并不运动,造成摩擦误差。
(2) 当电机转矩小于摩擦力时,能量被传动系统弹性环节储存起来,当电机转矩大于摩擦力时,由于静摩擦力大于动摩擦力使得能量释放,造成系统振荡。
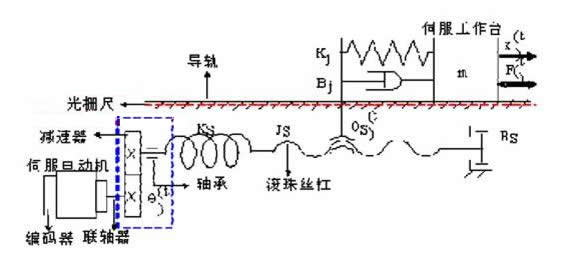
2、摩擦误差补偿
工作台改变方向时速度为0,静摩擦力最大,摩擦误差最大,因此常把摩擦误差称为过象限误差,摩擦误差补偿也通常从反向点处开始。
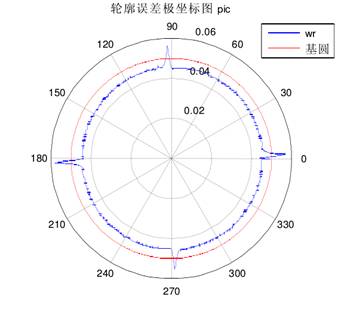
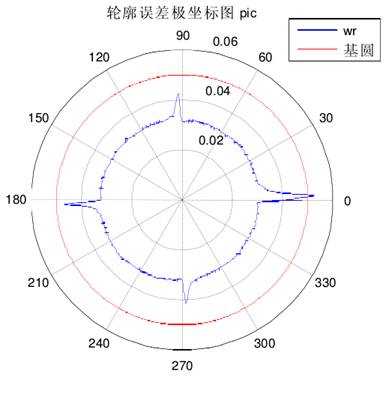
摩擦导致的过象限误差



1、摩擦误差产生原因
(1) 高速时,速度指令大→电机转矩大于摩擦力,不会造成摩擦误差。低速时,速度指令小→电机转矩小,当电机转矩小于摩擦力时,电机在旋转,但工作台并不运动,造成摩擦误差。
(2) 当电机转矩小于摩擦力时,能量被传动系统弹性环节储存起来,当电机转矩大于摩擦力时,由于静摩擦力大于动摩擦力使得能量释放,造成系统振荡。
2、摩擦误差补偿
工作台改变方向时速度为0,静摩擦力最大,摩擦误差最大,因此常把摩擦误差称为过象限误差,摩擦误差补偿也通常从反向点处开始。
摩擦导致的过象限误差
阿凡达共发布829篇

2023-06-13624
2023-06-021422
2023-06-021343
2023-06-02706
2023-06-02642
2023-06-02850
2023-06-02663
2023-06-02733
2023-06-02839
2023-06-02709