1、摩擦误差产生原因
(1) 高速时,速度指令大→电机转矩大于摩擦力,不会造成摩擦误差。低速时,速度指令小→电机转矩小,当电机转矩小于摩擦力时,电机在旋转,但工作台并不运动,造成摩擦误差。
(2) 当电机转矩小于摩擦力时,能量被传动系统弹性环节储存起来,当电机转矩大于摩擦力时,由于静摩擦力大于动摩擦力使得能量释放,造成系统振荡。
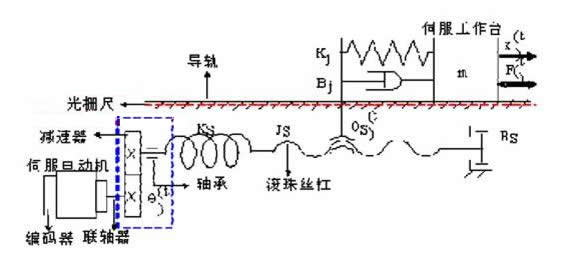
2、摩擦误差补偿
工作台改变方向时速度为0,静摩擦力最大,摩擦误差最大,因此常把摩擦误差称为过象限误差,摩擦误差补偿也通常从反向点处开始。
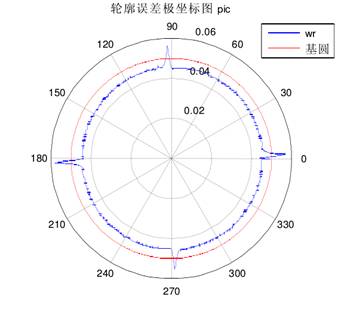
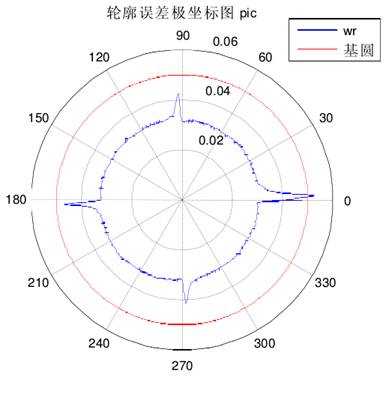
摩擦导致的过象限误差


1、摩擦误差产生原因
(1) 高速时,速度指令大→电机转矩大于摩擦力,不会造成摩擦误差。低速时,速度指令小→电机转矩小,当电机转矩小于摩擦力时,电机在旋转,但工作台并不运动,造成摩擦误差。
(2) 当电机转矩小于摩擦力时,能量被传动系统弹性环节储存起来,当电机转矩大于摩擦力时,由于静摩擦力大于动摩擦力使得能量释放,造成系统振荡。
2、摩擦误差补偿
工作台改变方向时速度为0,静摩擦力最大,摩擦误差最大,因此常把摩擦误差称为过象限误差,摩擦误差补偿也通常从反向点处开始。
摩擦导致的过象限误差
版权声明:本站部分内容文章及图片来自互联网或自媒体,版权归属于原作者。如内容、图片有任何版权侵权问题,请联系我们处理,我们将在第一时间删除内容。
免责声明:数控信息网发布此文目的在于促进信息交流,不存在盈利性目的,此文观点与本站立场无关,不承担任何责任。未经证实的信息仅供参考,据此操作风险自担。如遇虚假诈骗信息,请立即举报
0评论2025-02-081078
0评论2025-02-081112
0评论2025-02-081104
0评论2025-02-081029
0评论2025-02-081076
0评论2025-02-08653
0评论2024-01-031441
0评论2024-01-031438
0评论2023-06-13595
0评论2023-06-13952