极坐标输入法如图2-47所示,曲线起、终点坐标A和E是以极坐标值表示的,有R,![]()
![]() ,
,![]()
![]() ,
,![]()
![]() ,
,![]()
![]() 等5个数据,它们均已从程序输入,结合所键入的刀具半径r值,从而可求得各坐标分量为
等5个数据,它们均已从程序输入,结合所键入的刀具半径r值,从而可求得各坐标分量为
![]() =
= ![]()
![]()
![]()
![]() =
= ![]()
![]()
![]()
![]() =
= ![]()
![]()
![]()
![]() =
=![]()
![]()
![]()
其具体过程为:
(1) 键入r值;
(2) 输入R值,并计算![]() 值;
值;
(3) 输入![]()
![]() ,求出
,求出![]() ;
;
(4) 输入![]()
![]() ,求出
,求出![]() ;
;
(5) 输入![]()
![]() ,计算
,计算![]() ;
;
(6) 输入![]()
![]() ,求出
,求出![]() ;
;
(7) 求出终点判别值。
最后将修正后的坐标值![]() ,
,![]() ,
,![]() ,
,![]() 分别存放,刀具偏移计算结束。
分别存放,刀具偏移计算结束。
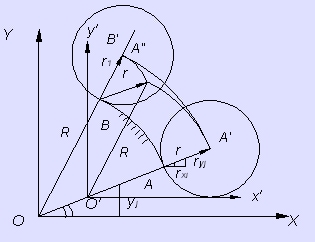
图2-47 极坐标输入法


极坐标输入法如图2-47所示,曲线起、终点坐标A和E是以极坐标值表示的,有R,![]()
![]() ,
,![]()
![]() ,
,![]()
![]() ,
,![]()
![]() 等5个数据,它们均已从程序输入,结合所键入的刀具半径r值,从而可求得各坐标分量为
等5个数据,它们均已从程序输入,结合所键入的刀具半径r值,从而可求得各坐标分量为
![]() =
= ![]()
![]()
![]()
![]() =
= ![]()
![]()
![]()
![]() =
= ![]()
![]()
![]()
![]() =
=![]()
![]()
![]()
其具体过程为:
(1) 键入r值;
(2) 输入R值,并计算![]() 值;
值;
(3) 输入![]()
![]() ,求出
,求出![]() ;
;
(4) 输入![]()
![]() ,求出
,求出![]() ;
;
(5) 输入![]()
![]() ,计算
,计算![]() ;
;
(6) 输入![]()
![]() ,求出
,求出![]() ;
;
(7) 求出终点判别值。
最后将修正后的坐标值![]() ,
,![]() ,
,![]() ,
,![]() 分别存放,刀具偏移计算结束。
分别存放,刀具偏移计算结束。
图2-47 极坐标输入法
版权声明:本站部分内容文章及图片来自互联网或自媒体,版权归属于原作者。如内容、图片有任何版权侵权问题,请联系我们处理,我们将在第一时间删除内容。
免责声明:数控信息网发布此文目的在于促进信息交流,不存在盈利性目的,此文观点与本站立场无关,不承担任何责任。未经证实的信息仅供参考,据此操作风险自担。如遇虚假诈骗信息,请立即举报